

DARPA's sensor-laden quadcopter zooms around indoors at 45 mph
The Fast Lightweight Autonomy program could give soldiers and rescue teams a look inside unstable buildings with a minimum of operator effort.
A Pentagon research program to develop small, fast, agile unmanned vehicles that could operate in tight spaces indoors recently tested sensor-laden quadcopters that managed to avoid obstacles while hitting their target speed on 20 meters per second (about 45 miles per hour).
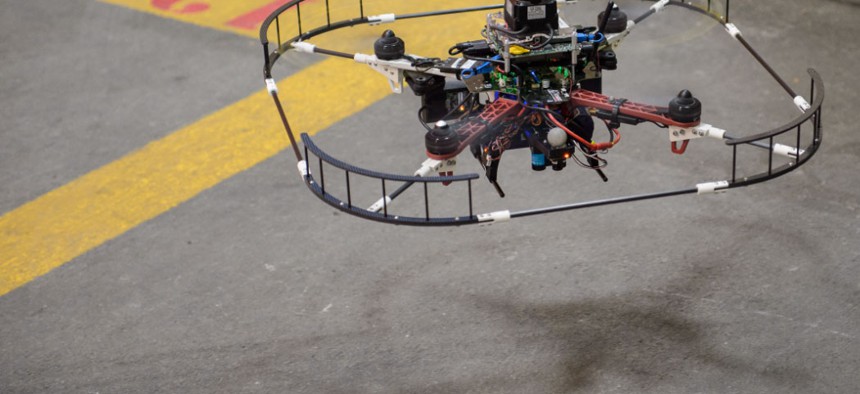
The specially equipped quadcopters, developed by three teams of researchers under the Defense Advanced Research Projects Agency’s Fast Lightweight Autonomy (FLA) program, were equipped with high-definition onboard cameras and sensors such as LIDAR (the laser-based Light Detection And Ranging technology), sonar and inertial measurement units. The quadcopters were able to navigate a cluttered hangar in Massachusetts without the intervention of operators, outside sensors or GPS, DARPA said in a release.
The goal behind FLA is to give dismounted soldiers a view inside buildings, especially in urban areas, and do it with a minimum of involvement by drone operators. Units such as expeditionary military teams and rescue teams already have UAVs that can provide an eye in the sky to help with situation al awareness, but they can’t see inside a building that could be unstable or threatening. FLA is working to develop algorithms that will allow small drones to operate independently, gathering images and data inside a building without an operator, who might have other things to do, having to control their every movement.
For the tests, researchers used quadcopters with a commercial DJI Flamewheel 450 airframe, E600 motors with 12-inch propellers and 3DR Pixhawk autopilot, DARPA said. And while showing their speed, the quadcopters also demonstrated a degree of autonomy, although DARPA said it is still looking to improve on that.
“We’re excited that we were able to validate the airspeed goal during this first-flight data collection,” said Mark Micire, DARPA program manager. “The fact that some teams also demonstrated basic autonomous flight ahead of schedule was an added bonus. The challenge for the teams now is to advance the algorithms and onboard computational efficiency to extend the UAVs’ perception range and compensate for the vehicles’ mass to make extremely tight turns and abrupt maneuvers at high speeds.”
On the project, DARPA is working with teams of Draper with the Massachusetts Institute of Technology; the University of Pennsylvania; and Scientific Systems Co. with AeroVironment.
A key to the FLA program is managing to equip small UAVs with the sensors that will allow them to sense their environment and operate autonomously (one future possibility could be replacing lenses, mirrors and other components with light-emitting and -detecting semiconductor dots on wafer-thin discs, an idea DARPA issued a solicitation for in December.)
“Very lightweight UAVs exist today that are agile and can fly faster than 20 meters per second, but they can’t carry the sensors and computation to fly autonomously in cluttered environments,” Micire said. “And large UAVs exist that can fly high and fast with heavy computing payloads and sensors on board. What makes the FLA program so challenging is finding the sweetspot of a small size, weight and power air vehicle with limited onboard computing power to perform a complex mission completely autonomously.”
In future tests, DARPA plans to add more obstacles to the hangar to make the environment more realistic. And although the program is working with quadcopters, the agency said its technology could also be applied to ground, sea surface and underwater vehicles, particularly in areas where GPS signals are contested or denied.